Computational Robotics From Tasks to Motions
Computational robotics is the study of making self-driving systems that can plan and carry out complicated movements while avoiding obstacles and changing conditions. Pioneering research by people like Erion Plaku has set up basic methods that combine rigorous maths with useful strategies for application. Robot motion planning is the study of how machines make safe, efficient paths while taking into account physical limitations, confusion in the environment, and computational limits. It is used in a wide range of situations, from industrial handling to self-navigation.
Section 1: Foundations of Robot Motion Planning
1.1: Configuration Space Representation
The mathematical framework for describing all the states a robot can be in is called "configuration space." This method changes the planning problem into a geometric search in a place with many dimensions, where each dimension stands for a degree of freedom. The setup space is now six-dimensional for a robotic arm with six joints, as each point represents a different set of joint angles.

The great thing about configuration space is that it makes it easier to find collisions. Complex three-dimensional items can be turned into areas to avoid by mapping hurdles from physical space into configuration space. This change lets managers think of the robot as a single point moving through a changed world. This lets robots with many degrees of freedom make decisions in real time.
1.2: Collision Detection and Avoidance Algorithms
The most important safety feature in any motion planning system is collision recognition. Modern algorithms use hierarchical bounding volumes to quickly get rid of parts of space that don't seem to overlap. They only do more in-depth checks when they need to. These methods find a good balance between accuracy and speed, so robots can check the safety of suggested movements in a short amount of time.
Avoidance tactics can be as easy as reacting or as complex as making predictions. Reactive methods change paths based on real-time sensor data, while prediction methods guess how dynamic objects will behave in the future. As the field of computational robotics develops, these methods include more and more machine learning techniques that make them better over time.
Section 2: Sampling Based Motion Planning Methods
The variety of sampling-based planning methods is the result of many years of study into how to balance different goals.
2.1: Comparative Analysis of Planning Algorithms
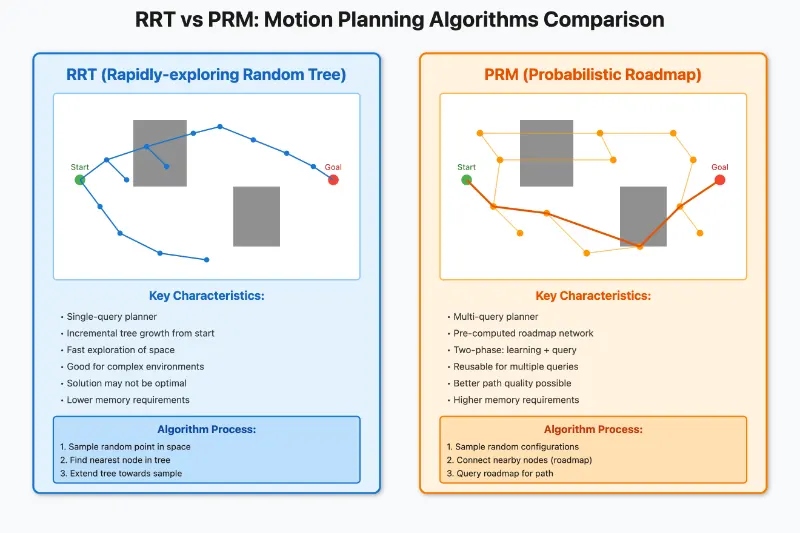
Traditional methods, such as RRT, focus on quick discovery by making tree structures one step at a time that reach randomly sampled configurations. This approach works great in high-dimensional spaces where an exhaustive search is not possible. This makes it useful for robotic systems that are very complicated and have a lot of joints or limits.
| Algorithm Type | Computational Complexity | Completeness | Best Use Cases | Key Limitations |
|---|---|---|---|---|
| Rapidly-exploring Random Trees (RRT) | O(n log n) average case | Probabilistically complete | High-dimensional spaces, single-query problems | No optimality guarantees, irregular paths |
| Probabilistic Roadmap (PRM) | O(n log n) preprocessing | Probabilistically complete | Multiple queries in static environments | Preprocessing overhead, narrow passage struggles |
2.2: Probabilistic Roadmap Approaches
Probabilistic roadmaps prepare settings to create networks of tracks that don't collide that can be used again and again. The method picks random configurations, checks them for collisions, and then makes a graph by connecting acceptable configurations that are close to each other. Once it's built, this roadmap quickly solves many motion planning questions by discovering ways through the current network. It works best for uses where conditions stay mostly the same.
The sample approach has a big impact on how well PRM methods work. Uniform random sampling works well in wide open spaces but not so well in small, tight spaces. Modern methods deal with this problem by using adaptive sampling to focus computer power on tough areas, bridge testing to focus on narrow routes, and mixed approaches that mix different strategies to get reliable coverage across a wide range of environment types.
Section 3: Applications in Complex Robotic Systems
3.1: Mobile Robotics and Ground Navigation
When mobile robots are around people, they have to find their way through busy areas, deal with unexpected hurdles, and stay away from people at all times. For these uses, robot motion algorithms include social rules, models that can predict how people will act, and real-time replanning features that let the robots easily change to changing conditions.

Ground-based platforms have fewer dimensions than flying or swimming robots, but they have to deal with rough ground and different surface qualities. Hierarchical methods are often used in planning systems to separate global path planning from local trajectory optimisation. This way, the big picture of the route can be understood while immediate problems are dealt with through reacting layers.
3.2: Key Challenges in Multi Robot Coordination
The hardest parts of coordinating multiple robots:
- Communication bandwidth limits put basic limits on how much information robots can share. This forces systems to prioritise important data and come up with ways to work when they don't fully understand the states and goals of their teammates.
- Robots must organise their actions in real time to make sure that joint tasks are completed in the right order and that shared resources can be used without any problems or delays.
- Scalability of planning algorithms is very important as the number of people on the team grows, because centralised methods that make plans for all robots become exponentially more difficult to compute as more people join the team.
- When robots with different abilities, sensors, and motion limits have to work together, heterogeneous team coordination makes things more complicated. This means that planning systems need to be able to think about the different skill sets and give jobs correctly.
- Robustness to individual failures makes sure that teams can keep working well even when members have technology problems, communication problems, or other problems that take them out of service for a short time or forever.
Researchers like Erion Plaku have looked into how spread planning methods keep cooperation while keeping computers from going crazy. These systems find a balance between local liberty and global goals. This way, each robot can make its own choices while still working together as a cohesive unit.
Section 4: Robotics in Online Casinos
Robots are used in more than just online casinos. They are also used on the halls of real casinos to help with customer service and running the business. Service robots move through busy gaming areas to bring drinks, give people information, and help them. These uses need strong robot motion planning that can deal with large groups of people, unpredictable human moves, and a presence that doesn't get in the way.

4.1: Autonomous Service Systems in Gaming Environments
Because casinos are open 24 hours a day, seven days a week, and have complicated plans with slot machines, gaming tables, and frequent building changes, they present special challenges. The computer programs that do the robotics have to take into account changing problems, like customers who might not see the robots and employees who need to move things around. Planning algorithms make paths that are socially acceptable, respect personal space, and don't get in the way of gaming.
4.2: Implementation Requirements for Casino Robotics
Needs for putting casino robotics into action:
- Real-time obstacle recognition systems constantly process sensor data to find and track people, furniture, and temporary obstacles. This lets robots change their paths on the fly while keeping their motion smooth and predictable, which makes guests close feel safe.
- Robots that can navigate on more than one level can move between floors, use service lifts, and get to back-of-house areas while staying aware of areas that need special permissions or pose high safety risks.
- Following the rules for gaming makes sure that robotic systems don't get in the way of the games, can't be used to get unfair benefits, and meet strict security requirements that keep both casinos and customers safe.
- When robots are connected to gambling management systems, they can get tasks, report their progress, work with human staff, and change how they act based on the number of guests, special events, and the time of day.
- If something goes wrong, fail-safe behaviours and emergency procedures make sure that robots can safely stop working, go back to designated safe zones, and call for help if they find situations that are beyond their set abilities or potential dangers.
4.3: Computational Models for Casino Floor Navigation
Problems with robot motion planning in casinos have led to new ways of using computers to represent social places. In stores, robots can take the lead, but in casinos, robots have to be polite guests who respect human tastes. To do this, planning algorithms need to include cost functions that favour larger spaces around people, models that can predict where people will go, and flexible layers that can easily give up or shift when plans can't be carried out.
Structured parts of casino patterns are used in more advanced versions to improve speed. There are clear walkways, areas with set amounts of activity, and regular flow patterns on gaming floors. Over time, robots can learn these trends and use them to build statistical models that make planning go more smoothly. The way that computational robotics is used in casinos shows how methods can be changed to fit new markets where self-driving systems work closely with people in business settings.
Section 5: Advanced Topics in Computational Robotics
5.1: Research Contributions and Methodologies
The development of computational robotics shows how theory progress and real needs are always talking to each other. Researchers like Erion Plaku have helped build frameworks that can do more than just simple point-to-point motion planning. These frameworks can also handle formal language-based descriptions of complicated tasks. With these methods, users can tell robots what they need to do instead of how they should move, and planning systems will automatically put together movements that meet high-level needs.

| Research Area | Key Contributors | Main Contributions | Application Domains |
|---|---|---|---|
| Motion Planning | Erion Plaku, Lydia Kavraki | Sampling-based algorithms, configuration space methods | Manufacturing, autonomous vehicles |
| Temporal Logic | Erion Plaku, Calin Belta | Formal task specifications, automated synthesis | Service robotics, surveillance |
| Hybrid Systems | Multiple researchers | Continuous-discrete planning, mode switching | Legged locomotion, aerial vehicles |
5.2: Temporal Reasoning and Hybrid Systems
Temporal reasoning adds time as a basic part of the planning problem. This lets robots think about the order of actions, due dates, and how events happen in relation to each other in terms of time. This skill is very important for robots that need to work with processes that depend on time or sync their actions with those of other agents. In these situations, planning algorithms mix the usual way of planning robot movements with discrete thinking about how the robot should act or behave.
In hybrid systems, models with both continuous dynamics and discrete mode switches work together. A robot that walks and climbs at the same time is an example of this kind of system, since each mode is controlled by a different set of equations of motion. Planning for hybrid systems needs algorithms that can look over both continuous paths and discrete mode sequences at the same time. This is what led to research into abstraction methods that make problems easier to solve while still keeping important behaviour.
FAQ
What is gamification in online casinos?
When it comes to online casinos, "gamification" means adding game-like features like leaderboards, award systems, and prize systems to the gambling experience. These features get players more involved by giving them goals other than just winning or losing. Physical robots is not the same as this area, but both are interested in using systematic planning to improve the user experience.
Do online casinos use bots?
Bots can be used for automatic game testing, customer service chatbots, and security tracking to find trends of fraud in online gambling. But it is against the rules for players to use bots to get unfair benefits. In real casinos, robots do different things, like provide services and keep the building running smoothly. In these places, motion planning systems have to find their way through complicated social situations.
How does robot motion planning work?
Robot motion planning looks at all the different ways the robot could be set up to find paths from starting states to goal states that don't cause any collisions. Modern algorithms use sampling-based methods to look through configuration space at random, slowly building models of how areas that don't collide are connected. Then, planners look through these pictures to find acceptable motion patterns while maximising things like path length or energy use.
What is computational robotics?
The mathematical and algorithmic roots of computational robotics allow robots to understand their surroundings, plan their actions, and complete jobs without any help. This field uses computer science, applied mathematics, control theory, and artificial intelligence to solve problems in motion planning, sensing processing, coordinating multiple robots, and making decisions when there isn't enough information. The solutions are computer-implementable in real time.
Who is Erion Plaku?
To the field of computational robots, Erion Plaku has made important advances, especially in the areas of motion planning, temporal logic, and hybrid systems. His work has improved the theories behind how robots plan complicated behaviours while meeting formal requirements. It has also created useful ways to use these ideas in real robotic systems used in a wide range of situations.
What are the main applications of motion planning algorithms?
There are many uses for motion planning algorithms, such as in robotic manufacturing, self-driving cars, medical robotics for helping with surgery, space research for planetary rovers, warehouse operations, and service robotics in human settings. Each area has its own problems because of the complexity of the environment, safety rules, and performance standards. This is what keeps researchers looking for new, more specialised planning methods.
Conclusion
The way computational robotics has changed over time shows that the field is mature and still useful. Motion planning algorithms have grown from simple geometric thinking to complex frameworks that can deal with time limits, mixed dynamics, and coordinating multiple agents. As computer systems move into new areas, like self-driving cars and customer service roles in places like casinos, computing methods need to change to meet the new challenges. Combining learning-based methods with traditional planning methods should make robots more useful by letting systems get better with use while still meeting the safety standards needed for use in human-centered settings.